近期,南开大学化学学院刘遵峰教授合作团队在《国家科学评论》(National Science Review, NSR)上发表文章,报道了一种利用热力学-扭转耦合而实现的多模态人工肌肉。与已经报道的各类人工肌肉相比,这种新型人工肌肉的独特之处在于:在不同温度下对这种人工肌肉进行预先热处理,可以使其在不同的温度范围内具有不同的、可逆或不可逆的驱动性能:
南开大学胡晓宇博士为论文第一作者,南开大学刘遵峰教授、中国药科大学周湘副教授为共同通讯作者。
尼龙6纤维人工肌肉反复伸长、收缩,开关小伞
尼龙6纤维人工肌肉反复伸长、收缩,开关小尼龙6纤维人工肌肉一次性收缩,掐灭火苗
人工肌肉的主体部分是由“尼龙6”或其他半结晶高分子纤维扭转而成的螺旋结构,在一定温度下对其进行热处理,即可赋予其在不同温度范围内的不同热驱动性能。例如,在180℃对其进行热处理后:
驱动温度≪热处理温度时,人工肌肉为完全可逆模式;例如,将其反复升温至60℃、90℃或120℃温度,人工肌肉将完全可逆地反复伸长和完全回缩。
驱动温度不超过但接近热处理温度时,人工肌肉为不完全可逆模式;例如,将其反复升温至150℃或180℃,人工肌肉也将反复伸长和回缩,但其回缩时所达到的长度大于其原始长度。
驱动温度>热处理温度时,人工肌肉为完全不可逆模式;例如,将其升温至200℃后再降温,人工肌肉将一次性伸长而不会回缩。
在180℃进行热处理后,人工肌肉反复升温至不同温度时的长度变化模式
为进一步阐明这一过程中的“热力学-扭转耦合”原理,研究者还对过程中的结构变化进行了表征。结果显示,穿插在晶区间的无定形区的变化是多种驱动模式产生的关键。在温度驱动下,无定形区可以由受力相转化为自由相,如果在降温后自由相可以完全恢复为受力相,则驱动过程可逆,如果不能完全恢复、或完全不能恢复,则为不完全可逆或完全不可逆的驱动模式。
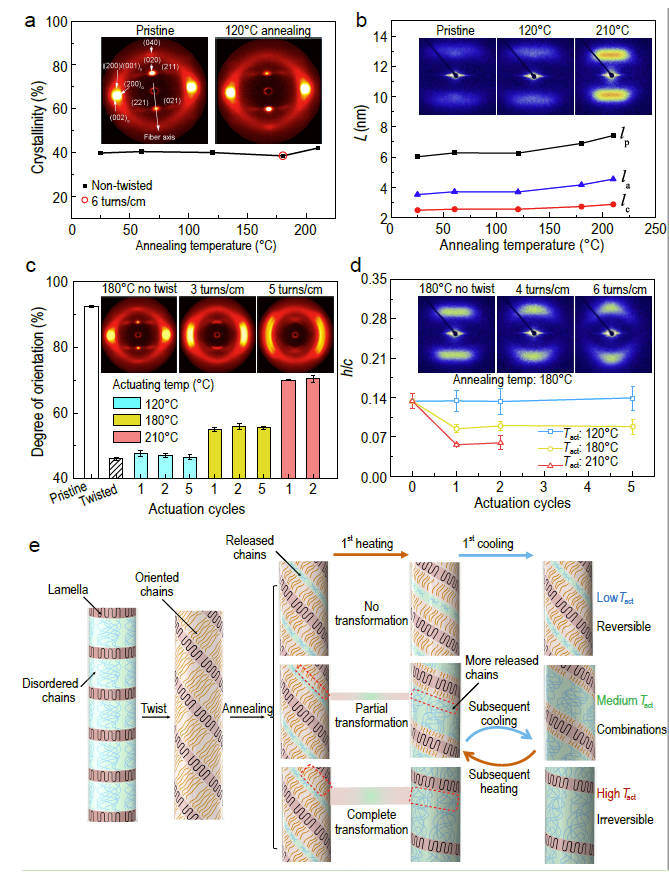
热力学-扭转耦合尼龙6人工肌肉纤维的结构演变:(a-d) 结构表征,(e)示意图。
实验显示,上述人工肌肉不仅可以实现多种驱动模式和多种运动形式,还具有易于调控、做功能力和输出功率强、使用温度范围广泛等优点,可以在多种不同的情形下得到应用。以尼龙6人工肌肉为例,其测得的最大做功能力达到2.1 J/g,是天然肌肉的50多倍,最大输出功率为2.5 kW/kg,最大可收缩应变达到85%,在这些方面的性能综合指标超过多种其他类型的人工肌肉。
在文章中,作者展示的此类人工肌肉的多种应用场景,如封堵管道缺口、用作管道支架、熄灭火焰、开关小伞、拾取物品、构建蠕动机器人等。
尼龙6人工肌肉拾取物品
尼龙6人工肌肉构建蠕动机器人
螺旋尼龙6人工肌肉纤维(a)不可逆与(b-f)可逆驱动的应用
这项工作为新型智能材料提供了一种新的设计策略。