微流体操纵系统可精确地将少量液体输送到目标位置进行传感或分析,被输送的流体被精确地感知和控制(包括体积、温度和浓度)。然而,因为传统的传感器无法适应微流体装置中狭小的空间,所以难以获得空心纤维中少量快速流动流体的实时数据。同时,由于流体的快速流动,快速传感和驱动并不容易实现。
近期,南开大学化学学院刘遵峰教授课题组,开发出了一种螺旋非线性应力的中空聚乙烯纤维驱动器(PEHF),可以实现快速传感、驱动,同时能够监测流体实时数据。在对流体流量的响应方面,所设计的驱动器具有高驱动行程(87.5%)、快速响应速度(0.88s)和高温度灵敏度(0.5 K温度变化时旋转20°),其工作能力和功率密度分别是空气驱动固体纤维的1.5倍和90倍。当液体在不同温度下流动时,扭转型中空纤维驱动器可以进行不同角度的旋转。同手性拉伸中空纤维驱动器在输送不同温度的液体时可以收缩不同长度,驱动器可以通过收缩不同长度输送和分类液体。中空纤维驱动器还可以作为夹子捕捉对象,能够实现提升2g负载和释放负载,为中空纤维驱动器在软机器人和工业制造中作为响应速度快、行程大的人造肌肉的应用提供了可能性。该工作以“Microfluidic manipulation by spiral hollow-fibre actuators”为题发表在《Nature Communications》上(Nat. Comm,(2022) 13:1331),第一作者是博士研究生李思彤。

图1:用于微流体操纵的中空纤维驱动器
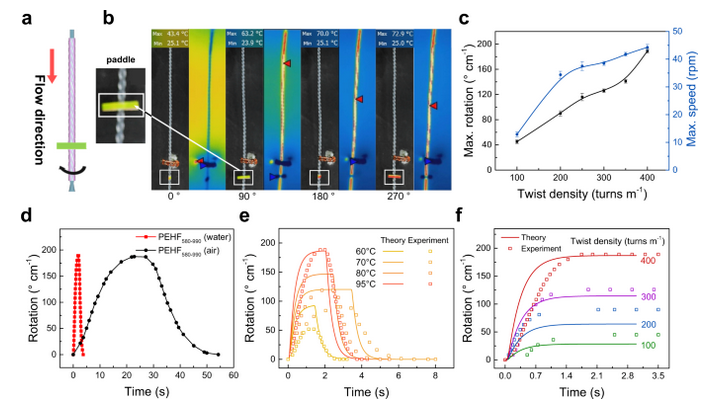
图2:扭转PEHF580-990驱动器的驱动性能
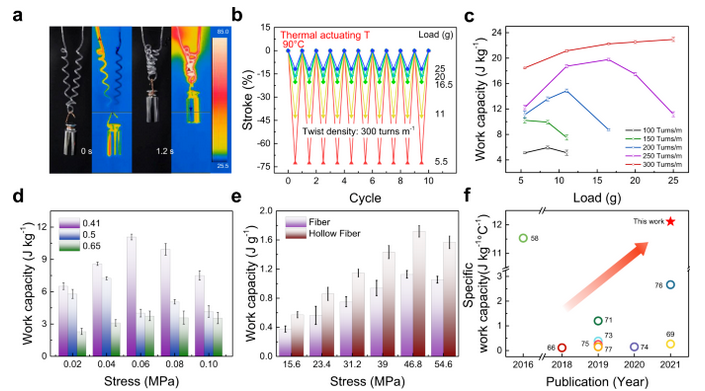
图3:流体驱动的同手性中空纤维驱动器的驱动性能

图4:PEHF580-990驱动器的微流体传感和操作
该工作是刘遵峰教授团队近期在柔性智能驱动器和传感器领域的最新进展之一。在过去的几年中,为了应对温室效应,提高制冷效率节省电能,团队还提出了一种柔性制冷新策略——“扭热制冷”,该策略的卡诺效率可以达到67%,远高于现有技术( Science, 11 Oct 2019: Vol. 366, Issue 6462, pp. 216-221)。团队为了扩宽柔性智能设备的应用场景,还研发出了可用作人工肌肉的超弹性导电纤维(Science, 2015, 349(6246): 400~404);能够耐高温和化学攻击的虾壳结构仿生驱动器(Adv. Mater.,2021,2104558);超强韧能用于高空缓降,并能在湿气下发生超收缩现象的人造蜘蛛丝(Nat. Comm., (2019) 10:5293);集体感、负重和多地形爬行等功能于一体的软体爬行机器人(Mater. Horiz., 2021,8, 1783-1794);可以感知湿度自动伸缩的智能头发人工肌肉(Mater. Horiz., 2021,8, 1538-1546);集神经传导、感知、驱动于一体的多功能人工肌肉(Mater. Horiz., 2020,7, 3305-3315)等成果,并且团队还发表了综述文章“Power of the Fiber Twist”,总结了捻度插入对纤维物理性质和化学性质的影响,及其在人工肌肉、制冷等方面的应用(Accounts of Chemical Research.2021,54,11,2624–2636)。
视频1
视频2
视频3
视频4
视频5
原文链接:
https://www.nature.com/articles/s41467-022-29088-9